Адрес для входа в РФ: exler.wiki
Боевой роботизированный цыпленок
Источник (англ.)
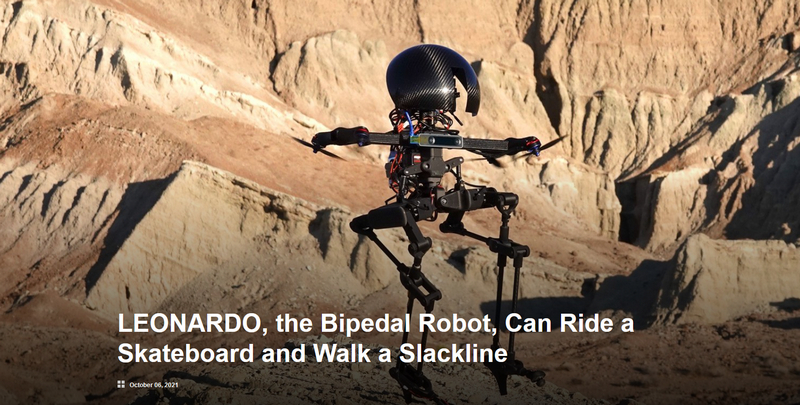
Исследователи из Калифорнийского технологического института создали двуногого робота, который сочетает ходьбу с полетом, что делает его исключительно проворным и способным к сложным движениям.
Назвали его LEONARDO (сокращенно от «LEgs ONboARD drOne» или сокращенно LEO) может ходить по натянутой веревке, прыгать и даже кататься на скейтборде. Разработанный командой Центра автономных систем и технологий (CAST) Калифорнийского технологического института, LEO является первым роботом, который использует многосуставные опоры и двигатели на основе пропеллера для достижения точной степени контроля над балансом.
«Мы черпали вдохновение в природе. Подумайте о том, как птицы могут хлопать крыльями и прыгать, чтобы перемещаться по телефонным линиям», - говорит Сун-Джо Чанг, автор-корреспондент и профессор Брена по аэрокосмическим и динамическим системам. «Птицы умеют совмещать ходьбу с полетом, этим мы и вдохновлялись при создании нашего робота».
Ну и, в общем, создатели намерены и дальше совершенствовать этого робота, потому что на данный момент энергия у него используется не слишком эффективно.
Но он уже производит впечатление, посмотрите ролик.


- Где мы?
- В Латгалии.
"Через два дня".

И скрылась из глаз
под машиной Белаз. (из детства)
Ненуачо? Дёшево и сердито зато, вместо ентих пропеллерОв, батарейку жрущих... ?
А если серьёзно, то почти не вижу перспектив практического применения такого "гибрида" в реальных задачах. Если только поиграться, да по выставкам потусить. ИМХО.
Тем более, в неидеальных погодных условиях. Ведь, судя по размеру винтов, дрон весьма лёгкий. Но в такой вертикальной компоновке, вместе с "головой" и "туловищем" – парусность у него получится ощутимо выше стандартных "строго воздушных" решений. Да ещё и со слабыми движками. То есть, любой ветер "чуть выше среднего" просто снесёт его с ног – хоть в наземном положении, хоть в воздушном.
Вот поэтому и написал, что тут "ни рыба, ни мясо" – скорее уж, собрали воедино все проблемы и недостатки наземного и воздушного решений. ИМХО.
Не переносите, пожалуйста, на других свою дурную привычку – видеть какую-то там "политику" даже в сугубо технических вопросах.
Алекс, тут "бабы говорят", что в ноябре выкатывают для России линейку хоноров 50 с завезёнными в них гуглосервисами. И они уже хорошенько подвинули в Китае сяоми.
Ты их спеки ещё не смотрел?
В данном случае - смотря какой движок поставить. У летательных аппаратов вертолетного типа при пропорциональном масштабировании потребная для полета мощность растет (в первом приближении) как R^(7/2), так что если массу увеличить с 10 кг до 100, размер возрастет в 2,15 раза, а двигатель потребуется в 14,7 раз мощнее, чем у модельки.
Вот это да!..

Роликовые коньки прекрасно позволяют как двигаться по асфальту, так и бегать по лестнице (ну, не то, чтобы бегать, но как-то перемещаться можно). Меняем бесприводные ролики на моторизованные гусеницы и будет у нас шагающе-ездящий вездеход.
Ног, естественно, делаем, как минимум, четыре, мы же не боги, мы не ограничены в фантазии и средствах.
Летать+ездить проще, чем летать+ходить. Конструктивно ноги сложнее, кпд ниже, дополнительный контроллер, который всю эту кинематику разруливает. Т.е. чисто с точки зрения разработки именно хождение, безусловно, интереснее (сам паука мастерил с целью чуть вспомнить институтскую математику - расчёт углов поворотов серводвигателей для заданной точки ноги и все такое, но забросил, потому что дешевые сервы оказались барахлом, а два десятка дорогих покупать жаба задушила). С практической же особого смысла не имеет, при наличии возможности взлететь. Продукция BD впечатляет куда больше, там все по чесноку.

Тактический.
- Не летают.
- А лейтенант говорил, что летают.
- Ну значит летают, только очень-очень низко.
А квардрокоптер на ходулях, нет, не производит впечатление.


Назвали бы Джокондой...